
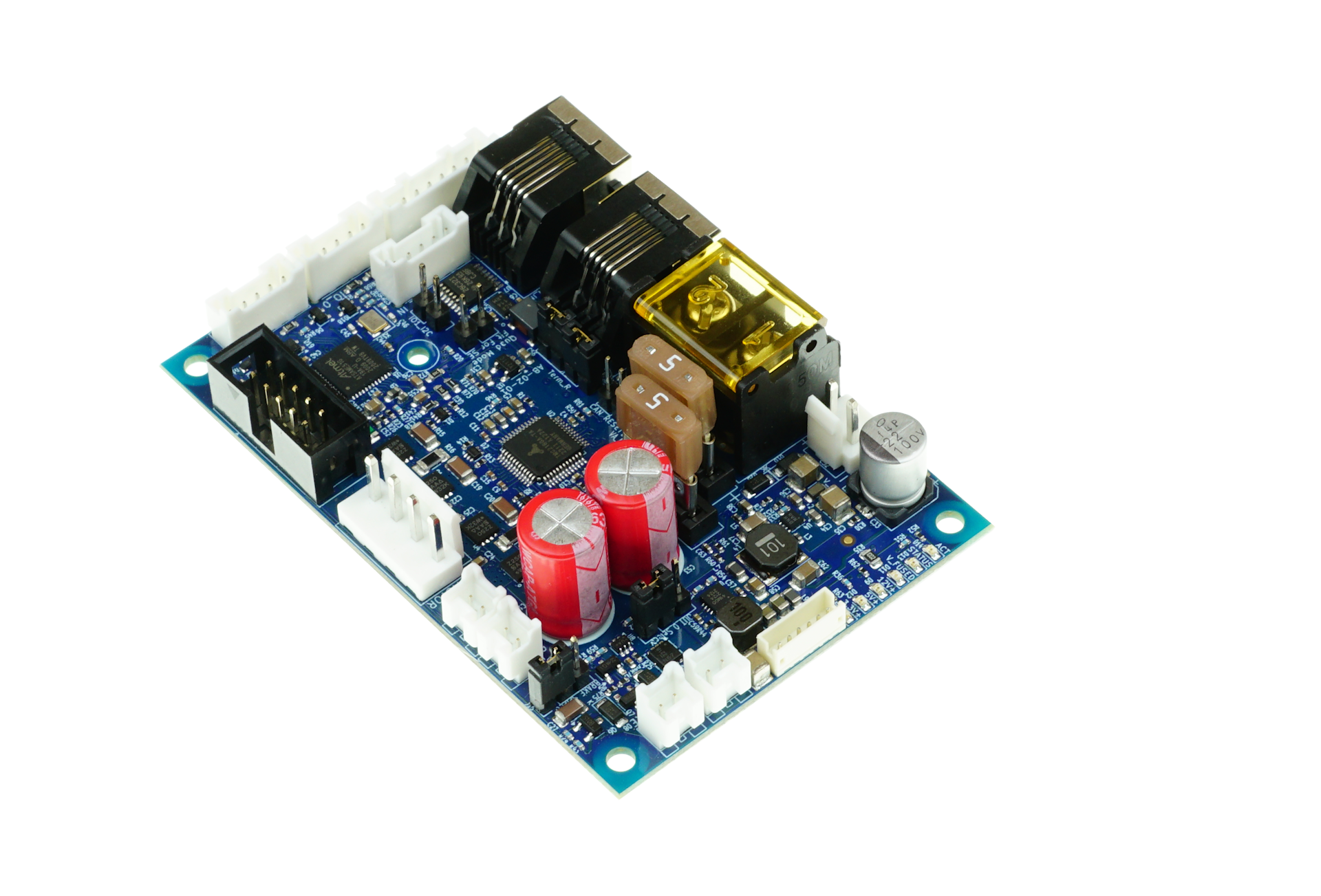




Duet 3 Expansion 1HCL
The Duet 3 Expansion 1HCL is a CAN-FD connected expansion board.
Product description
The Duet 3 Expansion 1HCL board provides a high current Stepper motor driver, combined with multiple interfaces for position feedback and firmware to implement closed loop position control. In addition it has a number of peripheral inputs and outputs for functions such as sensing motor temperature, controlling a brake and axis endstop. It connects to the Duet 3 CAN-FD bus using RJ11 connectors (same as the Duet 3 Mainboard 6HC, Duet 3 expansion boards, and the tool distribution board). Multiple Duet 3 Expansion 1HCL boards can be daisy chained on the bus, with power (up to 48V) provided locally. This allows for very large machines to be constructed without a significant wiring burden and signal integrity issues.
FEATURES
| Processor | Microchip ATSAME51G19A |
| Processor features | 32-bit, 120MHz ARM Cortex-M4F, 512Kb flash, 192Kb RAM, hardware single precision floating point unit |
| Networking/Comms | CAN-FD BUS for connection to the Duet 3 Mainboard. Optional on-board CAN bus termination. |
| On-board Stepper Driver | 1 x TMC2160A |
| Stepper Driver features | SPI controlled, can be run in open loop or closed loop mode. Maximum motor current 6.3A peak per phase (4.45A RMS) |
| Encoder Inputs | Single Ended/Differential Quadrature or SPI bus |
| Thermistor/PT1000 inputs | 2 x thermistor/PT1000 inputs. This is intended to allow for motor temperature monitoring, potentially coupled with a cooling system controlled by one of the outputs |
| Medium current output | 1 x medium-current (2.5A max) output at V_FUSED or VA_FUSED (V_AUX with fuse protection) voltage, with PWM capability and built-in flyback diodes |
| Brake output | 1 x Brake Solenoid (1A max) output at V_FUSED or VA_FUSED voltage. This circuit is designed to turn on/off very quickly to allow for fast brake engagement. It has PWM capability so can be configured to support 24V brakes when V_IN is 48V. Alternatively provide V_AUX at 24V for the brake. (note before v2.0 this output was OUT1 so could be used for a brake or other purpose, without the fast turn off) |
| Inputs/Outputs | 2 x 3.3V-level PWM capable output (3mA max), 2 x digital inputs, protected against over-voltage. Example use: endstop switches |
| Firmware | RepRapFirmware 3.4 and later; PID tuning plugin for Duet Web Control |
Documentation
| Hardware Overview | GO TO DOCUMENTATION > |
RELATED PRODUCTS

An expansion board for the Duet 3 Mini 5+ that provides an additional 2 x TMC2209 stepper motor drivers.

The Duet3D Magnetic Encoder is a precision motor encoder compatible with the Duet 3 Expansions 1HCL
An advanced, high power controller that features 6x 6.3A stepper drivers, 4 high current heaters, 6 fans and more. More stock expected August 2026.

An advanced, high power controller that features support for 6 external stepper motor drivers, along with similar outputs and IO as the Duet 3 Mainboard 6HC.

An advanced, mid range controller that features 5x 2A stepper drivers, 3 high current heaters, 4 fans and more.
